Krank Biyel
Çalıştığım makinelerden birinde bu mekanizmayla karşılaşmıştım ve fazlasıyla ilgimi çekmişti. İlgili hesaplamaları yaparken de gayet zevk aldım ve sizlerle paylaşmak istedim. Bu yazımda krank biyel mekanizmasında krank kolunun sabit açısal hızına karşı sistemin davranışını gözlemleyeceğiz.
Nedir, Nasıl Çalışır?
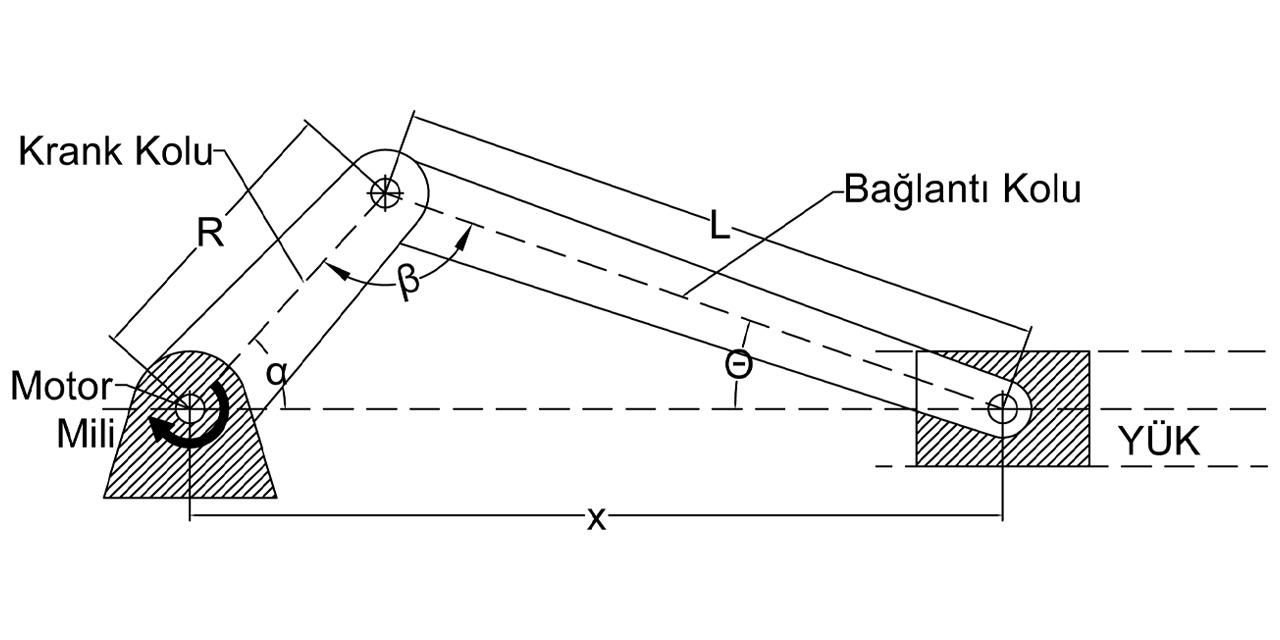
Krank biyel mekanizması krank ve bağlantı kolları olmak üzere iki kol ve bu iki kolu birbirine sabitleyen bir milden oluşur. Hareketi bir motor tarafından kontrol edilebilen krank kolunun dönmesiyle, bağlantı kolu yükü iter ve yük harekete geçer. Tabii ki bu hareketin kontrol altında gerçekleşmesi için bir takım hesaplamalar yapılmalıdır. Bu noktada referans alacağımız veriler motor milinin kaç derece döndüğü ve açısal hızıdır.
Araba motorları ve daha birçok makinenin iskeletinde görebileceğimiz krank biyel mekanizmasını istediğimiz şekilde kontrol edebilmek için krank kolunun dönüş açısına bağlı bir piston hareket fonksiyonu bulmalıyız.
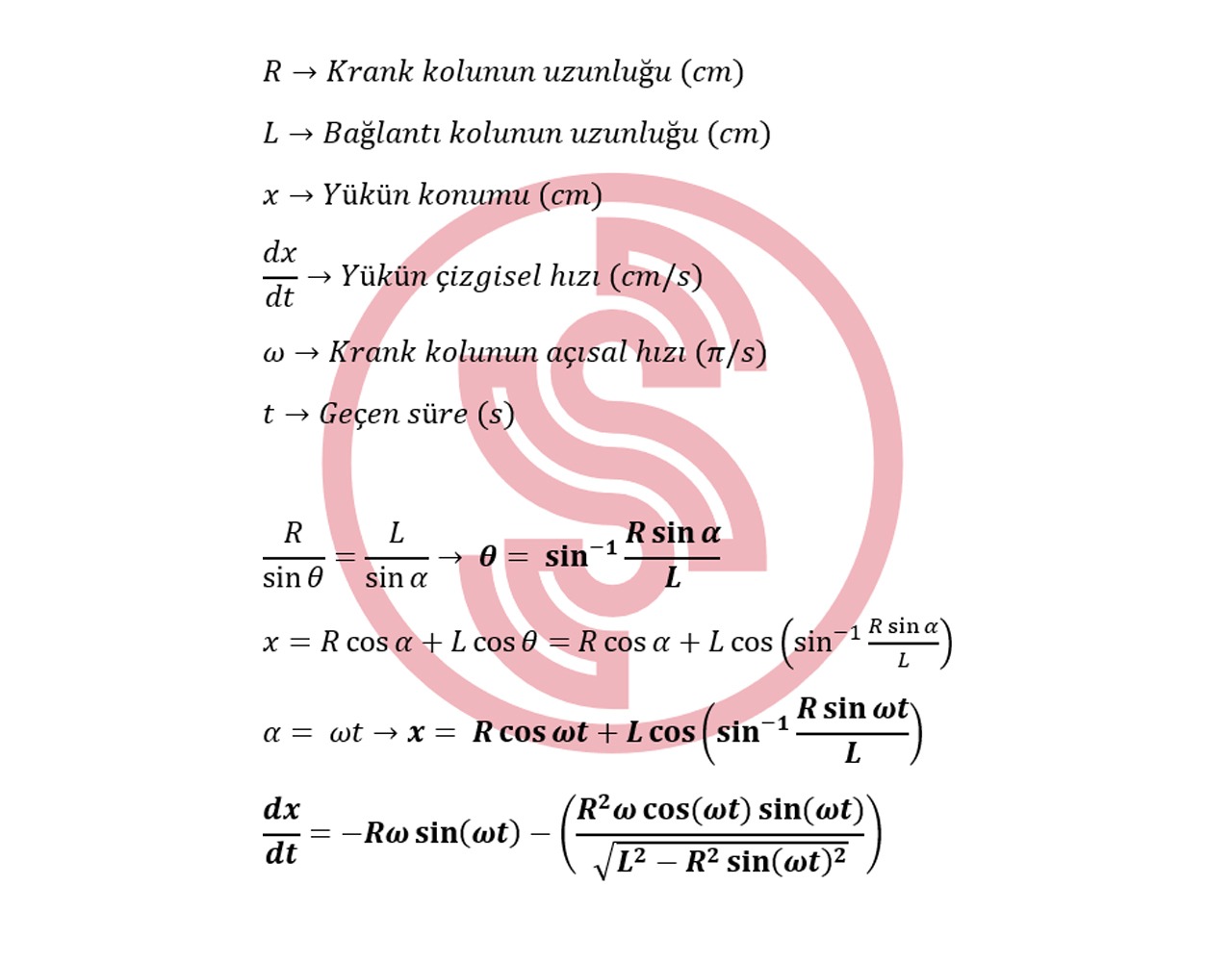
Bulduğumuz sonuçları;
krank kolunun açısal hızı → π,
krank kol uzunluğu → 15 cm,
bağlantı kol uzunluğu → 60 cm olacak şekilde Matlab üzerinden simüle ettiğimde aldığım sonuçları da sizinle paylaşıyorum.
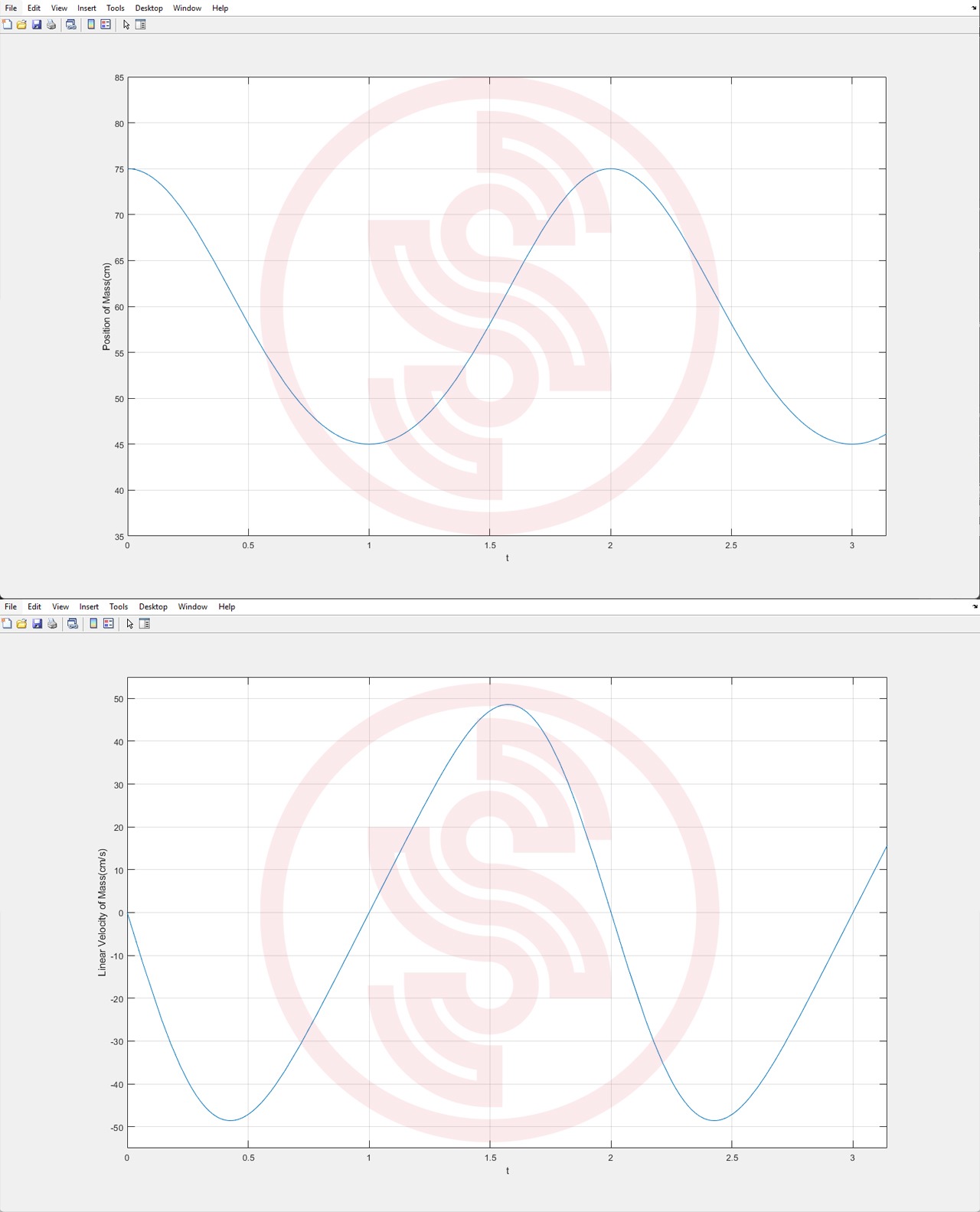
Matlab'ta gerçekleştirdiğim simülasyonda krank kolu başlangıç durumu yatay kabul edilmiştir. Bu durumda hareket aralığının sonunda olan yük geri harekete başlamıştır ve krank boyunun 2 katı kadar bir mesafede salınım yaptığı gözlemlenmiştir.